ホーム>研究概要>ロボティクス>全方位移動ロボットの部分観測環境下における深層強化学習を利用した長期プランニング
全方位移動ロボットの部分観測環境下における深層強化学習を利用した長期プランニング
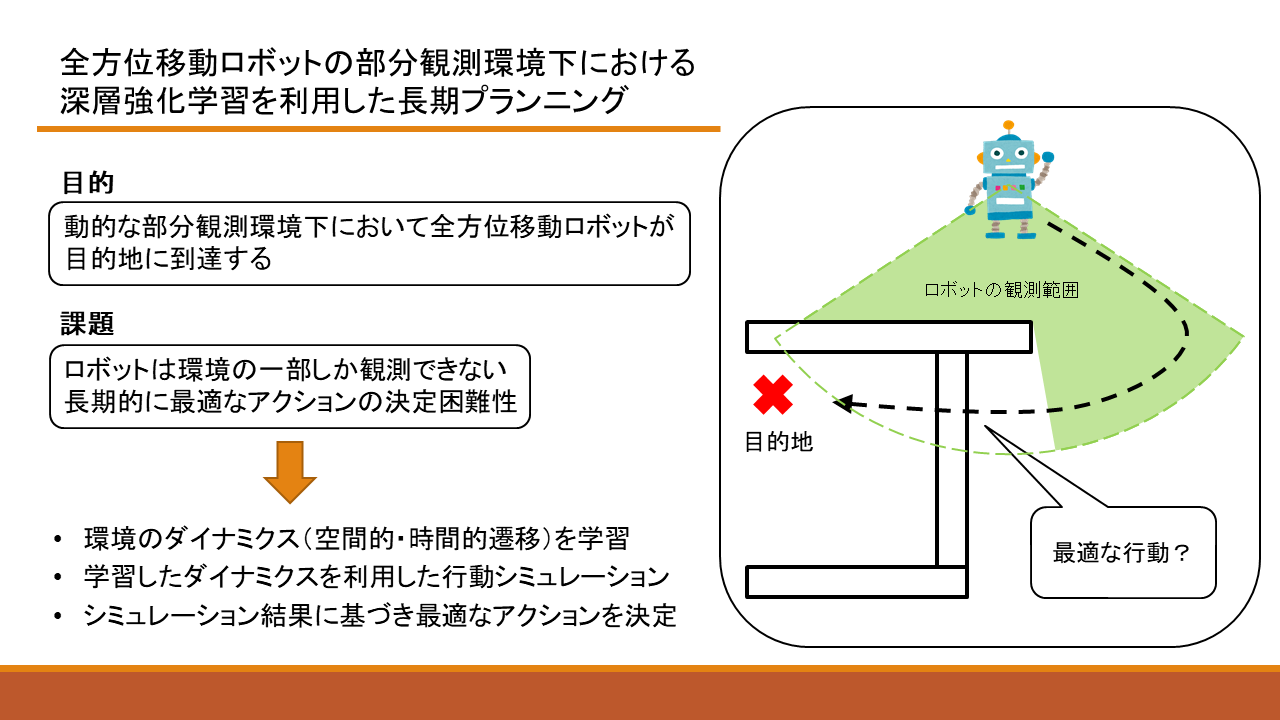
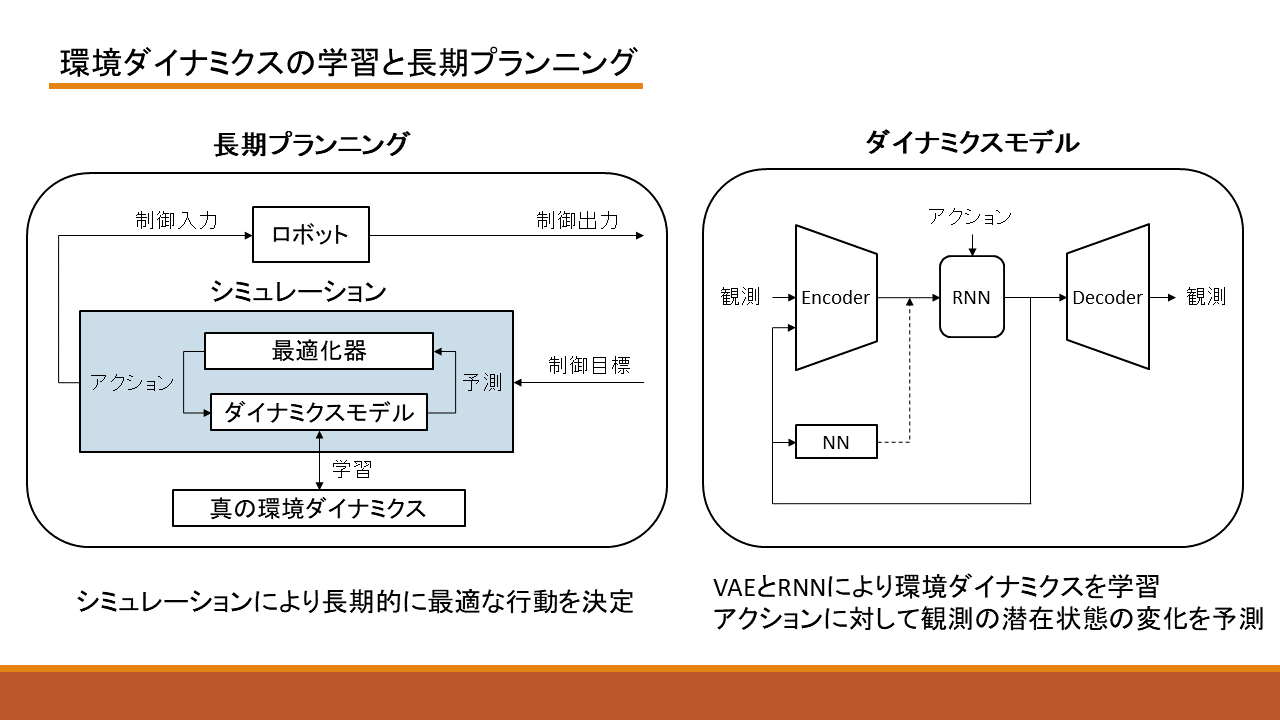
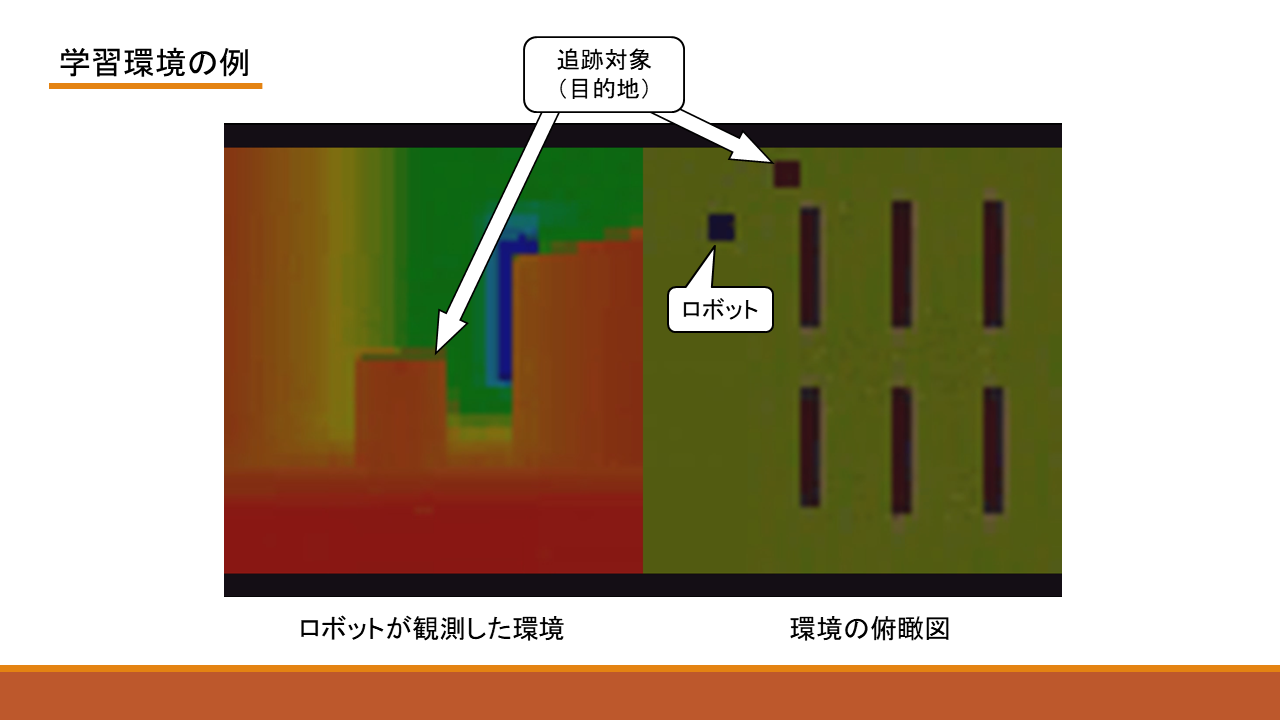
動的な部分観測環境下において全方位移動ロボットが目的地に到達するために、深層強化学習を利用して長期プランニングを行います。部分観測環境下では長期的に最適なアクションの決定が困難であることを解決するために、変分オートエンコーダ(VAE)とリカレントニューラルネットワーク(RNN)により環境のダイナミクスを学習し、学習したダイナミクスに基づきシミュレーションを行うことで最適なアクションを決定します。