ホーム>研究概要>ロボティクス>多関節ロボットの行動記憶に基づく強化学習
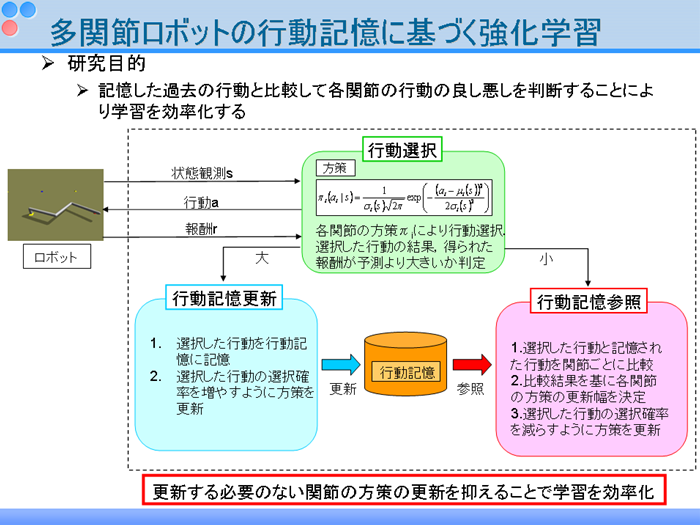
多関節ロボットの行動記憶に基づく強化学習
実環境での強化学習では必要な試行錯誤が許されない場合が多く,ロボットが満足な動作を獲得する前に壊れてしまうなどの問題もあります.そのような問題を解決するために,本研究では行動記憶により学習を効率化することを目指しています.