ホーム>研究概要>ロボティクス>ヒューマノイドロボット転倒制御システム及び最適化
ヒューマノイドロボット転倒制御システム及び最適化
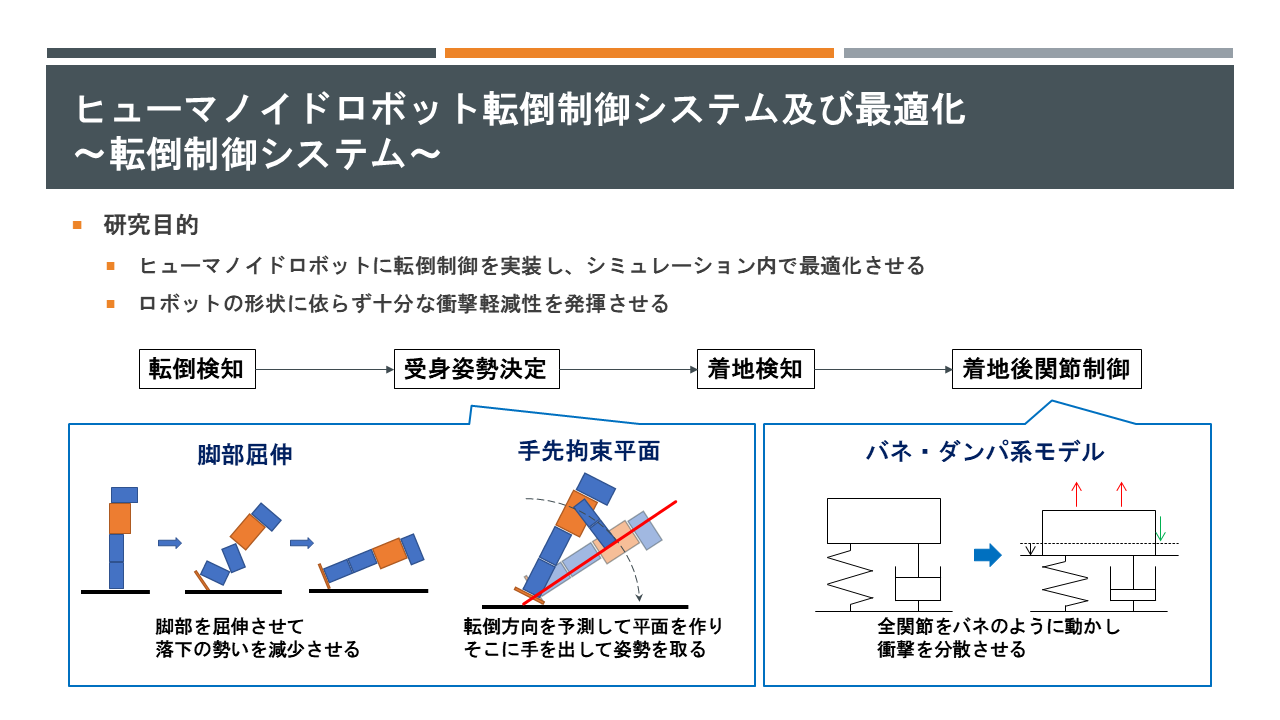
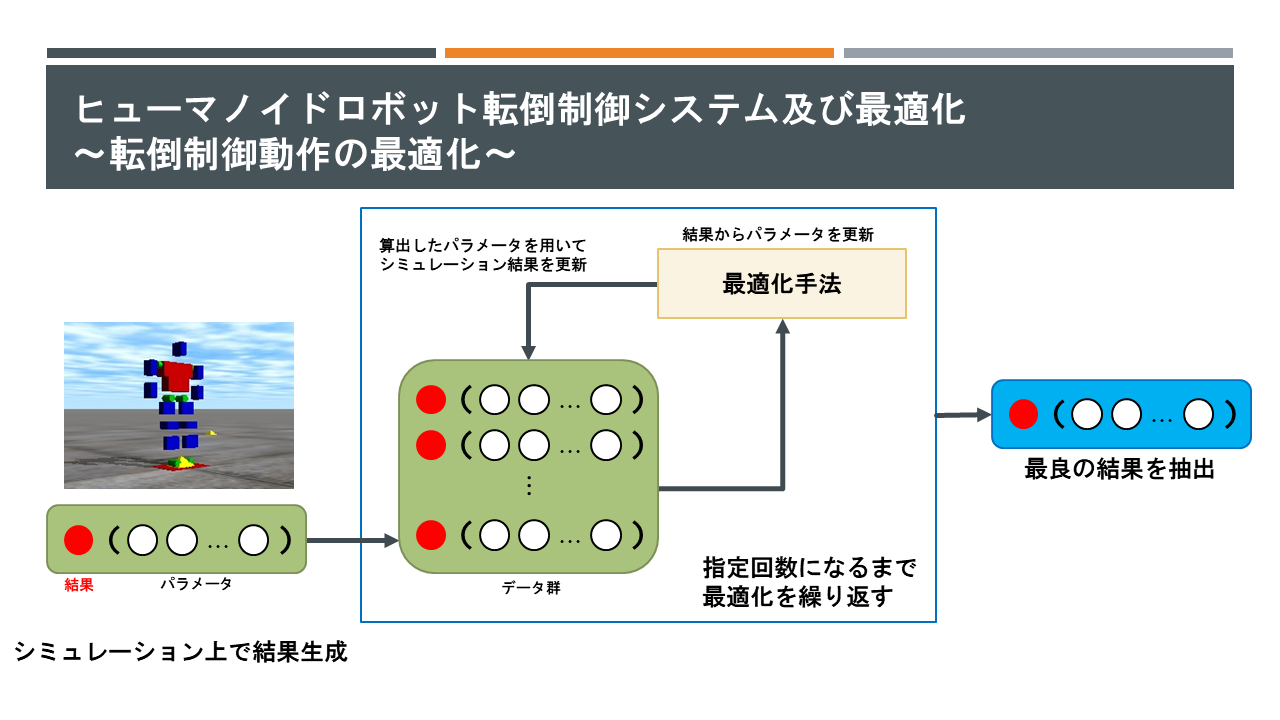
ヒューマノイドロボットは外部の影響によって完全に転倒を防ぎきれないことを前提に、ヒューマノイドロボットが転倒する時に衝撃を軽減する転倒制御を行います。転倒制御はヒトの受身を模した形となっており、動作をシミュレーション上で最適化させることにより、ロボットの形状に依らない衝撃軽減を行うことができます。