ホーム>研究概要>ロボティクス>転移学習により強化学習の環境ギャップの問題軽減
転移学習により強化学習の環境ギャップの問題軽減
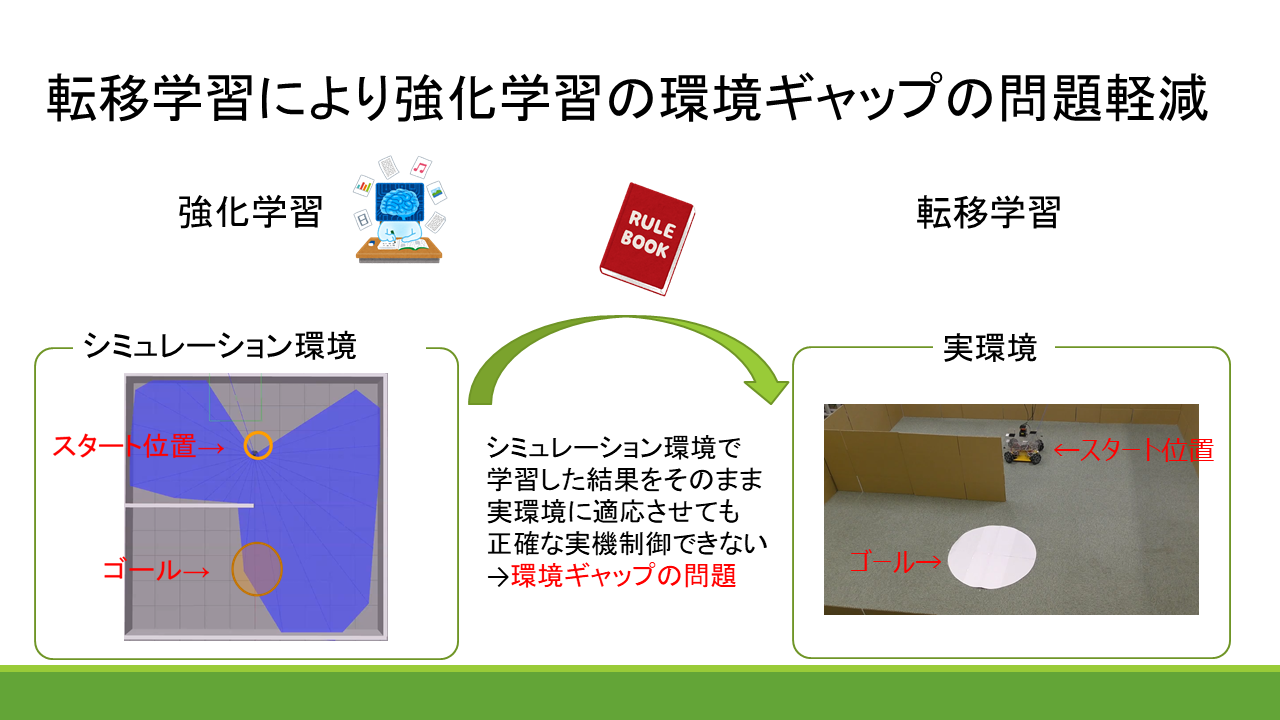
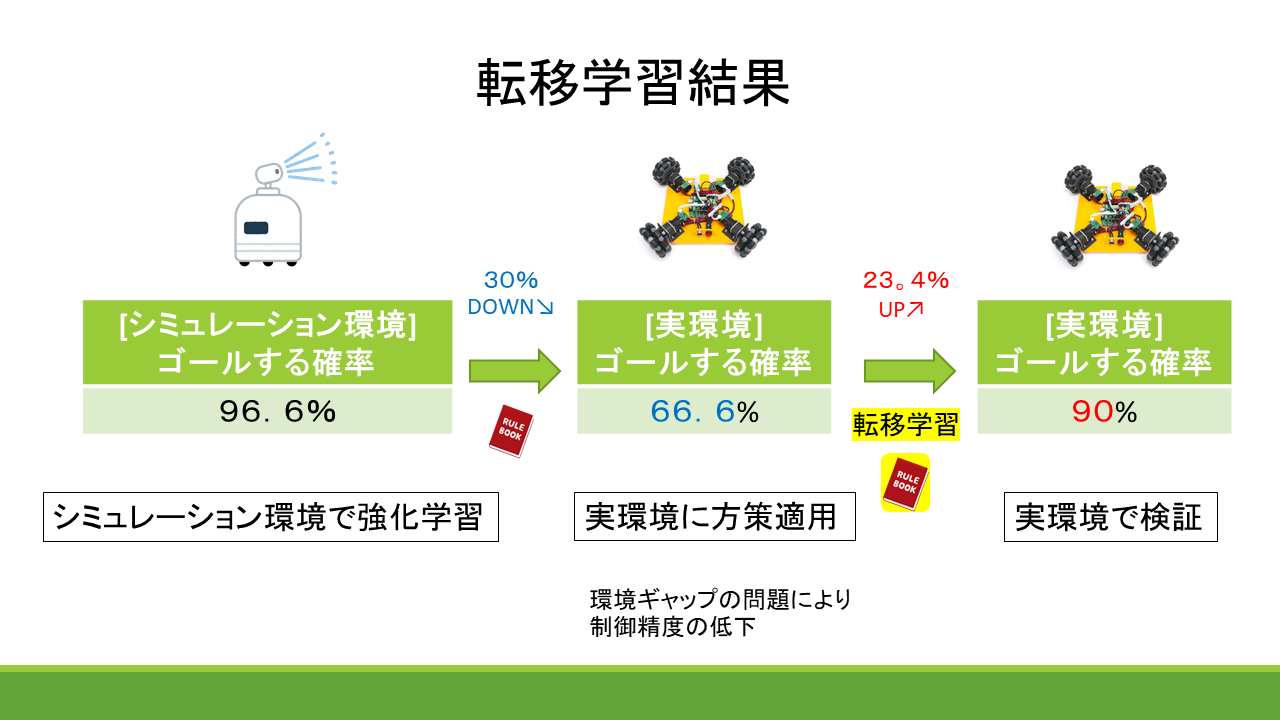
近年、労働者の負担軽減と事業の持続的成長の問題解決に物流ロボットの自動化などが期待されています.本研究では,強化学習による移動ロボット制御に取り組んでいます.強化学習は環境の違いに弱く、ロバストな実機制御は難しい問題があります.そこで私たちは,環境変化に強い強化学習による制御手法について研究しています.深層強化学習による動的な障害物を回避できるロボットの開発を目指しています.
シミュレーション環境
実環境